
Deep CV
EfficientNetB0 colab에서 pytorch로 구현해서 CIFAR-10 학습시켜보기 본문
EfficientNetB0 colab에서 pytorch로 구현해서 CIFAR-10 학습시켜보기
Present_Kim 2021. 2. 17. 02:53이 글은 딥러닝을 배우기 시작하고 공부하면서 정리해본 글로 잘못된 부분이 있을 수도 있으며 지적해주시면 감사하겠습니다.
논문 저자의 코드와 답변 글을 바탕으로 B0 버전을 구현해봤습니다.
github.com/mingxingtan/efficientnet
mingxingtan/efficientnet
EfficientNets snapshot. Contribute to mingxingtan/efficientnet development by creating an account on GitHub.
github.com
pytorch로 구현하는 과정에서 아래 코드를 참고하였습니다.
compound scaling을 어떤 식으로 했는지는 다음 포스팅에서 설명하고,
이번에는 EfficientNetB0의 구조와 구현 방법을 설명하겠습니다.
gitee.com/HaiFengZhiJia/EfficientNet-PyTorch
海风之家/EfficientNet-PyTorch
A PyTorch implementation of EfficientNet
gitee.com
import math
import torch
from torch import nn
from torch.nn import functional as F먼저 필요한 모듈을 import 해주시고
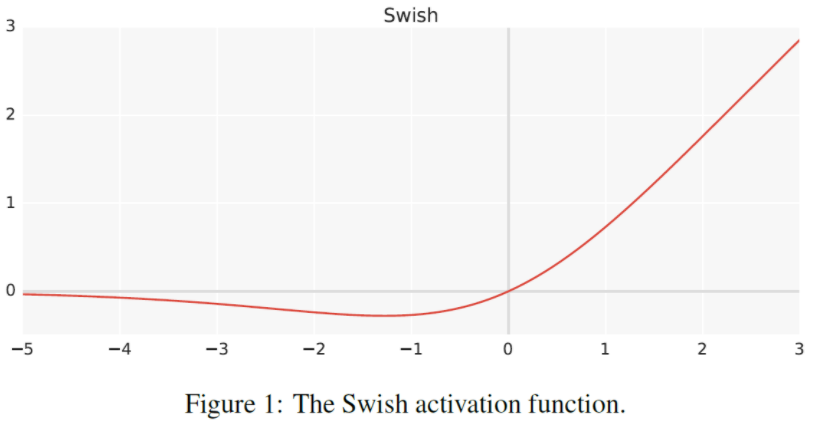
1. Activation Function
def relu_fn(x):
""" Swish activation function """
return x * torch.sigmoid(x)Activation func으로 relu라고 써져 있는데 Swish를 썼다.(왜 relu라고 함수 이름을 지었을까요?...)
Swish는 매우 깊은 신경망에서 ReLU 보다 높은 정확도를 달성한다고 합니다.
pytorch에서는 위와 같이 구현할 수 있습니다.
2. Conv2d
class Conv2dSamePadding(nn.Conv2d):
""" 2D Convolutions like TensorFlow """
def __init__(self, in_channels, out_channels, kernel_size, stride=1, dilation=1, groups=1, bias=True):
super().__init__(in_channels, out_channels, kernel_size, stride, 0, dilation, groups, bias)
def forward(self, x):
ih, iw = x.size()[-2:]
kh, kw = self.weight.size()[-2:]
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
x = F.pad(x, [pad_w//2, pad_w - pad_w//2, pad_h//2, pad_h - pad_h//2])
return F.conv2d(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
위 코드를 통해 output size를 설정해주고 식을 이용해 padding을 계산해주면
stride=2로 주어질 때는 size를 반으로 줄여주고 stride=1일 때는 유지시킬 수 있습니다.
x = F.pad(x, [pad_w//2, pad_w - pad_w//2, pad_h//2, pad_h - pad_h//2])
padding 홀수만큼 줘야 하면 오른쪽, 아래로 padding을 더 줬습니다.
def drop_connect(inputs, p, training):
""" Drop connect. """
if not training: return inputs
batch_size = inputs.shape[0]
keep_prob = 1 - p
random_tensor = keep_prob
random_tensor += torch.rand([batch_size, 1, 1, 1], dtype=inputs.dtype) # uniform [0,1)
binary_tensor = torch.floor(random_tensor)
output = inputs / keep_prob * binary_tensor
return output저자가 Github에 남긴 답변에 따르면 drop_connect_rate는 0.2라고 합니다.
즉, keep_prob는 0.8이 되고 random_tensor가 1보다 작을 확률은 0.2가 됩니다.
이를 torch.floor()를 써서 0 or 1로 만들어주고 inputs을 keep_prob으로 나눠준 것에 곱해줘서 output을 반환합니다.
근데 이렇게 하면 batch 중에 sample을 랜덤으로 통으로 drop 시키는 방법으로 weight를 drop 하는 게 아니지 않나?
생각이 들어 찾아봤습니다.
github.com/tensorflow/tpu/issues/494#issuecomment-532968956 답변에 따르면 여기서 사용한 drop out은
batch 중에 0.2(drop_connect_rate)의 확률로 entire conv를 drop 하는 Stochastic depth라는 방법이고,
제가 다른 글에서 다뤘던 dropconnect는 FC layer에서만 이라고 합니다.
여기서 또 이상한 게 논문을 제대로 읽어보진 못했지만(다음에 논문 리뷰 한번 해보겠습니다)
Stochastic Depth는 layer 전체를 skip 하는 방법으로 sample 단위로 drop 하는 게 아닙니다.

또, output = inputs / keep_prob * binary_tensor 여기서 keep_prob를 곱해주는 이유도 명확하지 않습니다.
위에 링크에서 다른 답변을 보면 sample 단위로 drop 하는 것과, keep_prob를 곱해준 이유는 평가 그래프를 simplify 하기 위해서라 했는데. 그게 왜 그런지는 설명이 없습니다...(아시는 분 있나요?)
4. MBConvBlock

5에서 전체 모델 설명을 위해
구조를 5가지로 구분해보겠습니다.
① Expansion Phase
② Depthwise convolution Phase
③ Squeeze and Excitation
④ Output Phase(project_conv)
⑤ Dropout
class MBConvBlock(nn.Module):
"""
Mobile Inverted Residual Bottleneck Block
"""
def __init__(self, kernel_size, stride, expand_ratio, input_filters, output_filters, se_ratio, drop_n_add):
super().__init__()
self._bn_mom = 0.1
self._bn_eps = 1e-03
self.has_se = (se_ratio is not None) and (0 < se_ratio <= 1)
self.expand_ratio = expand_ratio
self.drop_n_add = drop_n_add
# Filter Expansion phase
inp = input_filters # number of input channels
oup = input_filters * expand_ratio # number of output channels
if expand_ratio != 1: # add it except at first block
self._expand_conv = Conv2dSamePadding(in_channels=inp, out_channels=oup, kernel_size=1, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
# Depthwise convolution phase
k = kernel_size
s = stride
self._depthwise_conv = Conv2dSamePadding(
in_channels=oup, out_channels=oup, groups=oup, # groups makes it depthwise(conv filter by filter)
kernel_size=k, stride=s, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
# Squeeze and Excitation layer, if desired
if self.has_se:
num_squeezed_channels = max(1,int(input_filters * se_ratio)) # input channel * 0.25 ex) block2 => 16 * 0.25 = 4
self._se_reduce = Conv2dSamePadding(in_channels=oup, out_channels=num_squeezed_channels, kernel_size=1)
self._se_expand = Conv2dSamePadding(in_channels=num_squeezed_channels, out_channels=oup, kernel_size=1)
# Output phase
final_oup = output_filters
self._project_conv = Conv2dSamePadding(in_channels=oup, out_channels=final_oup, kernel_size=1, bias=False)
self._bn2 = nn.BatchNorm2d(num_features=final_oup, momentum=self._bn_mom, eps=self._bn_eps)batch momentum, epsilon은 저자가 사용한 상수 그대로 사용했습니다.
has_se는 ③가 들어가는지 인데 se_ratio가 계속 0.25로 사실 의미는 없습니다.
expand_ratio는 후에 나올 stage2에 해당하는 첫번째 MBConv만 1이고 모두 6으로 해당 stage에서만 ①를 스킵합니다.
depthwise_conv는 filter별로 conv를 하는 방법으로 filter 크기만큼 groups에 전달하면 됩니다.
squeez에서 reduce시에 output filter 개수는 layer의 input이 아닌 Block의 input filter의 1/4입니다.
def forward(self, inputs, drop_connect_rate=0.2):
# Expansion and Depthwise Convolution
x = inputs
if self.expand_ratio != 1:
x = relu_fn(self._bn0(self._expand_conv(inputs)))
x = relu_fn(self._bn1(self._depthwise_conv(x)))
# Squeeze and Excitation
if self.has_se:
x_squeezed = F.adaptive_avg_pool2d(x, 1)
x_squeezed = self._se_expand(relu_fn(self._se_reduce(x_squeezed)))
x = torch.sigmoid(x_squeezed) * x
# Output phase
x = self._bn2(self._project_conv(x))
# Skip connection and drop connect
if self.drop_n_add == True:
if drop_connect_rate:
x = drop_connect(x, p=drop_connect_rate, training=self.training)
x = x + inputs # skip connection
return x5. EfficientNetB0
class EfficientNet(nn.Module):
def __init__(self):
super().__init__()
# Batch norm parameters
bn_mom = 0.1
bn_eps = 1e-03
# stem
in_channels = 3
out_channels = 32
self._conv_stem = Conv2dSamePadding(in_channels, out_channels, kernel_size=3, stride=2, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
# Build blocks
self._blocks = nn.ModuleList([]) # list 형태로 model 구성할 때
# stage2 r1_k3_s11_e1_i32_o16_se0.25
self._blocks.append(MBConvBlock(kernel_size=3, stride=1, expand_ratio=1, input_filters=32, output_filters=16, se_ratio=0.25, drop_n_add=False))
# stage3 r2_k3_s22_e6_i16_o24_se0.25
self._blocks.append(MBConvBlock(3, 2, 6, 16, 24, 0.25, False))
self._blocks.append(MBConvBlock(3, 1, 6, 24, 24, 0.25, True))
# stage4 r2_k5_s22_e6_i24_o40_se0.25
self._blocks.append(MBConvBlock(5, 2, 6, 24, 40, 0.25, False))
self._blocks.append(MBConvBlock(5, 1, 6, 40, 40, 0.25, True))
# stage5 r3_k3_s22_e6_i40_o80_se0.25
self._blocks.append(MBConvBlock(3, 2, 6, 40, 80, 0.25, False))
self._blocks.append(MBConvBlock(3, 1, 6, 80, 80, 0.25, True))
self._blocks.append(MBConvBlock(3, 1, 6, 80, 80, 0.25, True))
# stage6 r3_k5_s11_e6_i80_o112_se0.25
self._blocks.append(MBConvBlock(5, 1, 6, 80, 112, 0.25, False))
self._blocks.append(MBConvBlock(5, 1, 6, 112, 112, 0.25, True))
self._blocks.append(MBConvBlock(5, 1, 6, 112, 112, 0.25, True))
# stage7 r4_k5_s22_e6_i112_o192_se0.25
self._blocks.append(MBConvBlock(5, 2, 6, 112, 192, 0.25, False))
self._blocks.append(MBConvBlock(5, 1, 6, 192, 192, 0.25, True))
self._blocks.append(MBConvBlock(5, 1, 6, 192, 192, 0.25, True))
self._blocks.append(MBConvBlock(5, 1, 6, 192, 192, 0.25, True))
# stage8 r1_k3_s11_e6_i192_o320_se0.25
self._blocks.append(MBConvBlock(3, 1, 6, 192, 320, 0.25, False))
# Head
in_channels = 320
out_channels = 1280
self._conv_head = Conv2dSamePadding(in_channels, out_channels, kernel_size=1, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
# Final linear layer
self._dropout = 0.2
self._num_classes = 10
self._fc = nn.Linear(out_channels, self._num_classes)
def extract_features(self, inputs):
""" Returns output of the final convolution layer """
# Stem
x = relu_fn(self._bn0(self._conv_stem(inputs)))
# Blocks
for idx, block in enumerate(self._blocks):
x = block(x)
return x
def forward(self, inputs):
""" Calls extract_features to extract features, applies final linear layer, and returns logits. """
# Convolution layers
x = self.extract_features(inputs)
# Head
x = relu_fn(self._bn1(self._conv_head(x)))
x = F.adaptive_avg_pool2d(x, 1).squeeze(-1).squeeze(-1)
if self._dropout:
x = F.dropout(x, p=self._dropout, training=self.training)
x = self._fc(x)
return x

논문에 B0의 적혀 있는 내용으로는 구조를 파악하기는 쉽지 않았다.
keras로 B0모델을 불러와서 보면서 구조를 분석해봤습니다. 옆의 표에 resolution, channel은 모두 input의 특성이고, #Layer는 Block 개수입니다.
같은 stage 내에서 channel은 첫 MBConvBlock에서 조절하고 이후의 MBConvBlock Input, Output channel의 수는 같습니다.
아래 그림으로 표현해 봤습니다. 안에 숫자는 위에 4. MBConvBlock에서 정의했습니다.

6. Model Summary
import torchsummary
from torchsummary import summary
model = EfficientNet()
summary(model,(3,224,224))


avgPooling, Add, Activation등은 layer로 인식이 안 되어 나오지 않지만
논문에 적혀있는 CIFAR-10에 적용한 model을 보면 parameter의 개수가 4m인걸 보아 model에는 문제가 없는 것 같습니다. 빠른 시일 내에 netron을 통해서 시각화하는 방법을 찾아 해 보겠습니다...
7. Train CIFAR-10
import torchvision
import torchvision.transforms as transforms
transform = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=64,
shuffle=True, num_workers=2)
valset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
valloader = torch.utils.data.DataLoader(valset, batch_size=64,
shuffle=False, num_workers=2)저자에 따르면 모든 Transfer Learning시에 data를 resize해서 학습시켰다고 합니다.
# loss
criterion = nn.CrossEntropyLoss()
# backpropagation method
learning_rate = 1e-3
optimizer = optim.Adam(model.parameters(), lr = learning_rate)
# hyper-parameters
num_epochs = 10
num_batches = len(trainloader)
list_epoch = []
list_train_loss = []
list_val_loss = []
list_train_acc = []
list_val_acc = []
train_total = 0
val_total= 0
train_correct = 0
val_correct = 0
for epoch in range(num_epochs):
trn_loss = 0.0
train_total = 0
#val_total= 0
train_correct = 0
#val_correct = 0
for i, data in enumerate(trainloader):
x, labels = data
# grad init
optimizer.zero_grad()
# forward propagation
model_output = model(x)
# calculate acc
_, predicted = torch.max(model_output.data, 1)
train_total += labels.size(0)
train_correct += (predicted == labels).sum().item()
# calculate loss
loss = criterion(model_output, labels)
# back propagation
loss.backward()
# weight update
optimizer.step()
# trn_loss summary
trn_loss += loss.item()
# del (memory issue)
del loss
del model_output
if (i+1) % 100 == 0:
print("epoch: {}/{} | batch: {} | trn loss: {:.4f} | trn acc: {:.4f}%".
format(epoch+1, num_epochs, i+1, trn_loss / i, 100 * train_correct / train_total))
# # 학습과정 출력
# if (i+1) % 100 == 0: # every 100 mini-batches
# with torch.no_grad(): # very very very very important!!!
# val_loss = 0.0
# for j, val in enumerate(valloader):
# val_x, val_labels = val
# val_output = model(val_x)
# # calculate acc
# _, predicted = torch.max(val_output.data, 1)
# val_total += val_labels.size(0)
# val_correct += (predicted == val_labels).sum().item()
# v_loss = criterion(val_output, val_labels)
# val_loss += v_loss
# print("epoch: {}/{} | batch: {} | trn loss: {:.4f} | trn acc: {:.4f}% | val loss: {:.4f} | val acc: {:.4f}%".
# format(epoch+1, num_epochs, i+1, trn_loss / i, 100 * train_correct / train_total,
# val_loss / len(valloader), 100 * val_correct / val_total))
list_epoch.append(epoch+1)
list_train_loss.append(trn_loss/num_batches)
#list_val_loss.append(val_loss/len(valloader))
list_train_acc.append(100 * train_correct / train_total)
#list_val_acc.append(100 * val_correct / val_total).

8. Test CIFAR-10
정확도 65% 모델을 가지고 Test 해본 결과



class가 10개 밖에 안 돼서 학습은 확실히 잘 되는 것 같습니다.